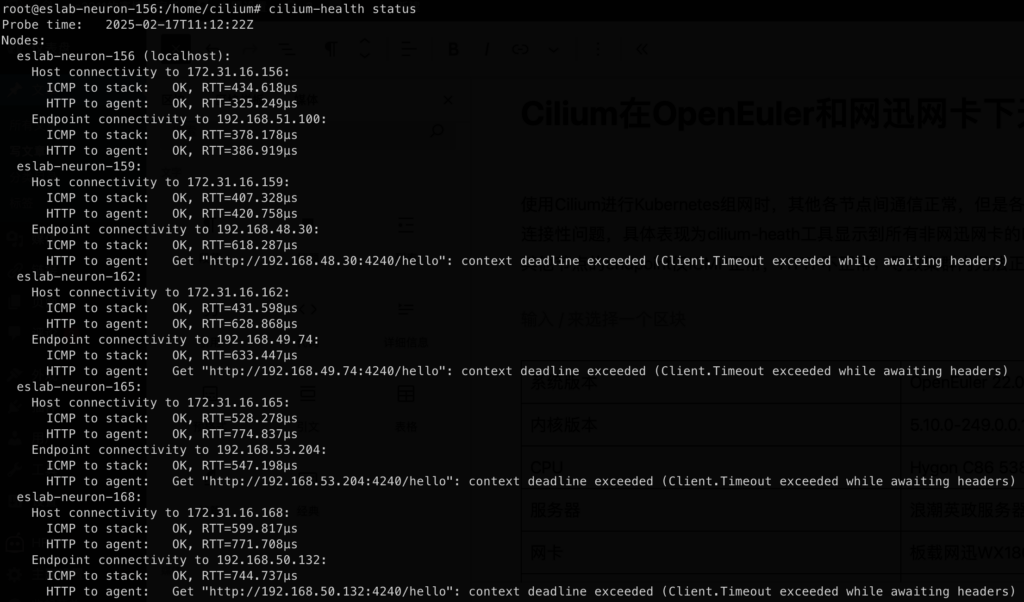
使用Cilium进行Kubernetes组网时,其他各节点间通信正常,但是各节点与使用网迅网卡的服务器存在连接性问题,具体表现为cilium-health工具显示到所有非网迅网卡的node的ICMP和HTTP正常,但是到其他节点的endpoint仅ICMP正常,HTTP不正常;导致集群内无法正常进行DNS和TCP通信。 系统版本 OpenEuler 22.03 SP4 内核版本 5.10.0-249.0.0.152.oe2203sp4.x86_64 CPU Hygon C86 5380 服务器 浪潮英政服务器CS5…
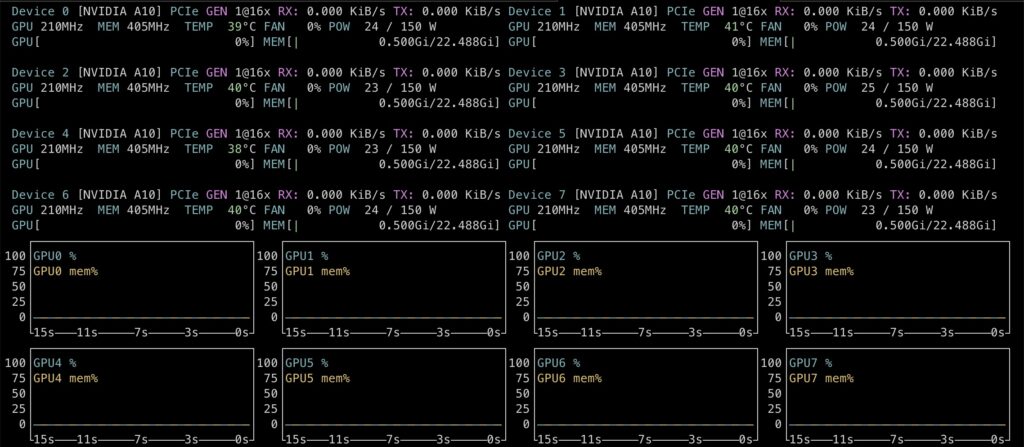
Rocky Linux 9.5安装NVIDIA A10驱动,无论是开源驱动和闭源驱动都安装完成后都提示找不到显卡,经排查存在以下现象。 这种情况是因为系统内核版本与NVIDIA发布时的版本不一致时,dkms不会默认编译内核扩展组件,部分软件包安装时会强制编译dkms组件,所以存在莫名其妙恢复正常的情况,这种情况可以使用以下方法解决。 首先,需要重启目标服务器,使内存中内核的版本和磁盘里内核版本一致;接着安装内核编译头和NVIDIA驱动。 接着查询所安装的具体dkms包名 复制完整的包名,如nvidia/535.21…
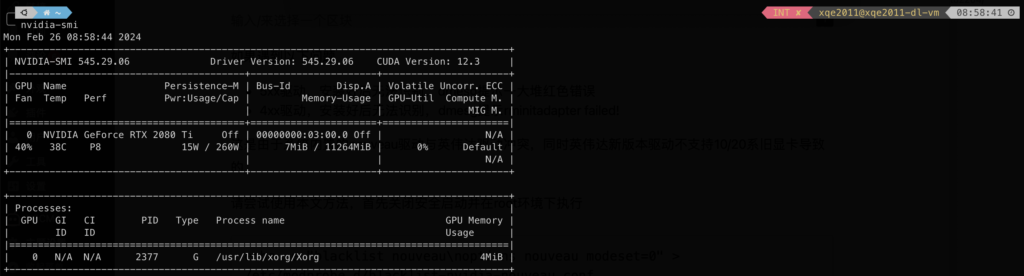
如果遇到以下问题 这是由于系统内置的nouveau驱动与英伟达驱动冲突,同时英伟达新版本驱动不支持10/20系旧显卡导致的。 请尝试使用本文方法,首先关闭安全启动并在root环境下执行 然后重启,运行nvidia-smi就能看到显卡了,同时显卡的显示输出功能也会被禁用。 上述代码会安装开源Kernel的英伟达最新驱动,根据实际测试,也可以选择4xx系列驱动,替换版本号为需要的版本即可。
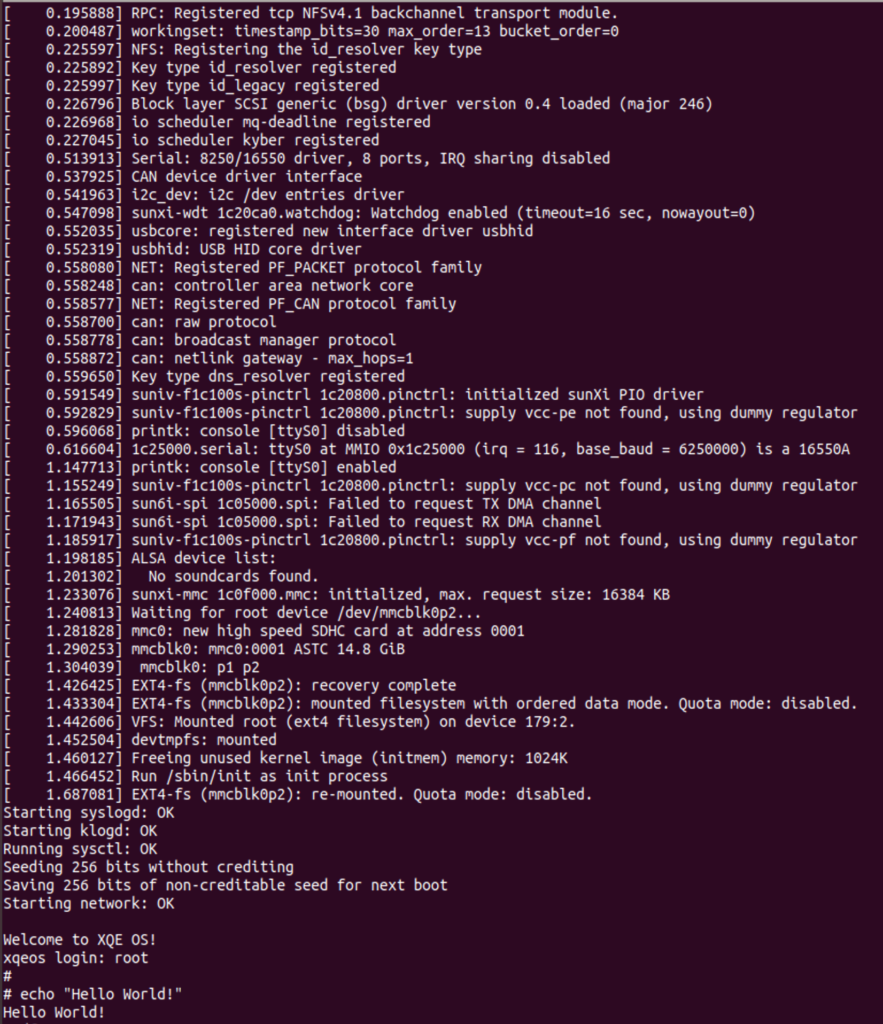
芯片启动的全过程大概是:Bootloader-Kernel-RootFS 对于我们这次实验来说,就是:uboot-linux kernel6.1.19-Buildroot 环境准备 本次实验宿主机使用全新的Ubuntu20.04环境,并在完成实验后用户目录下有以下结构的文件夹。 首先需要创建架构。 然后下载所有本次实验会使用到的代码和依赖。 每一章节结束后请返回workspace目录。 编译U-Boot 接下来我们需要准备U-Boot启动所需的配置文件,将以下内容写入boot.cmd。 接着编译配置文件。 编译Ke…
芯片启动的全过程大概是:Bootloader-Kernel-RootFS 对于我们这次实验来说,就是:uboot-linux kernel6.1.19-Buildroot 环境准备 本次实验宿主机使用全新的Ubuntu20.04环境,并在完成实验后用户目录下有以下结构的文件夹。 首先需要创建架构。 然后下载所有本次实验会使用到的代码和依赖。 每一章节结束后请返回workspace目录。 编译U-Boot 接下来我们需要准备U-Boot启动所需的配置文件,将以下内容写入boot.cmd。 接着编译配置文件。 编译Ke…
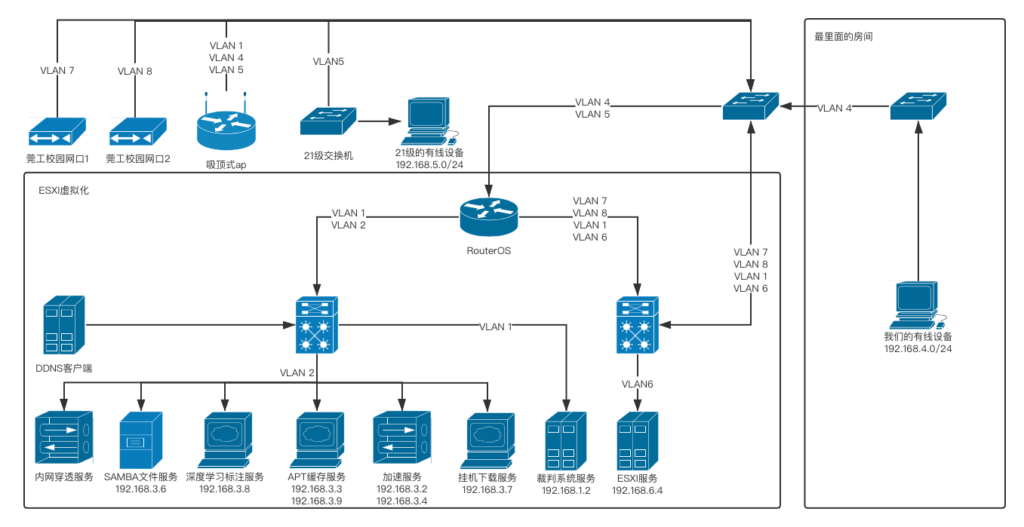
我进入我校的机器人实验室已经1年多了,实验室的网络一直都是处于能用就行的状态.路由器3米开外延迟就可以直达200ms+,机器人上的nuc只能用网线连接,改成无线比连接国外的服务器都卡.内网缺少一台NAS,机械组们传文件全靠微信等等一系列问题,所以我们对实验室的网络(包括有线和无线)进行改进.首先我们需要明确我们的需求: 无感APT缓存代理,无需改动任何源设置,就会被劫持到实验室内网的缓存服务器,考虑到21级同学进来后大概率会批量下载ubuntu/ros等软件,由于大家安装的软件都差不多,缓存命中率将会非常高. gi…
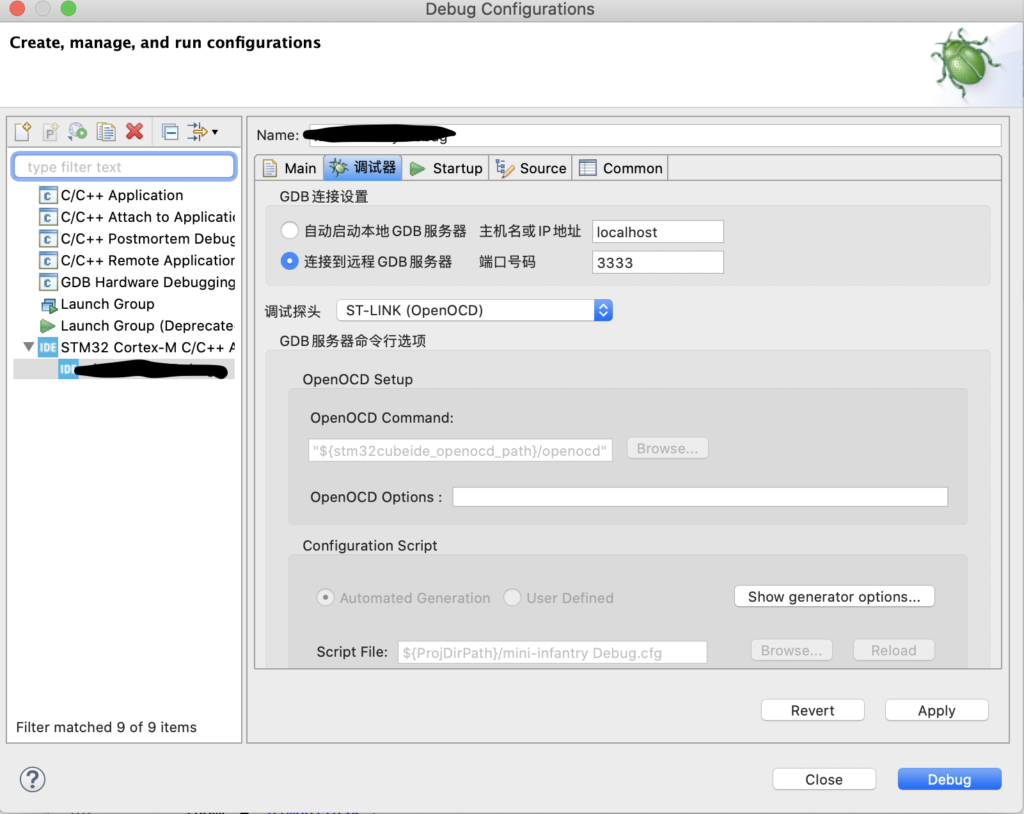
2020年了,STM32CubeIDE还不支持CMSIS-DAP.由于正点原子的远程调试器时基于CMSIS-DAP的,这也就意味着不能远程调试,于是我想能不能修改配置让他支持呢?从理论上来说,STM32CubeIDE用的GDB调试,只要想办法用个GDB服务器连接CMSIS-DAP,STM32CubeIDE再连接GDB服务器就行了.于是我找到了以下方案. 首先,打开“Run->Debug Configurations”,然后按照下图配置. 接着在项目跟目录下建立一个“debug.cfg”,根据实际情况修改下面代…
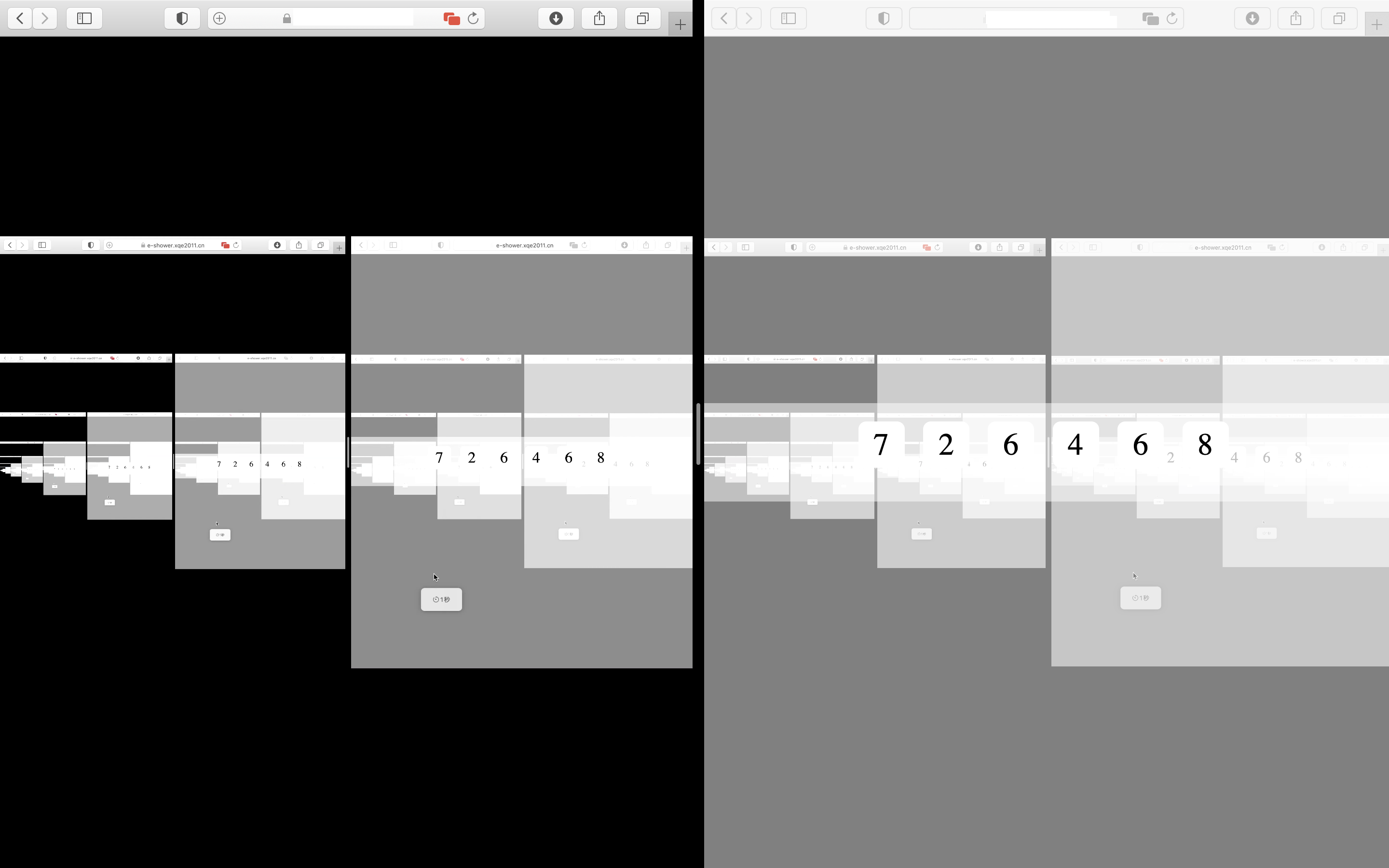
几天前,在上课的时候,老师的麦克风连接不上展台的电子白板,所以就无法扩音.这让我产生了一个想法,如果有一个工具,能利用手机作为麦克风,电脑1作为展示端,最好还能允许其他电脑将自己的屏幕画面推送到展示端去,是不是就能改善这个问题了呢?说干就干,我总结了这个工具的一些特点: 不需要安装,而且最好使用方便,操作简单,因此排除各大视频会议软件 传输延迟低 保密性,最好流传输时不经过服务器,如果一定要经过,那就经过自己的服务器 针对于以上特点,进行技术选型的时候,我做了以下选择 基于浏览器,只有基于浏览器,才能实现真正意义的…



